Note
Go to the end to download the full example code.
Basic example: Simple Linear System#
This example demonstrates the basic workflow of using the KKF library with a simple linear dynamical system.
======================================================================
KKF Basic Example: Simple Linear System
======================================================================
System created:
State dimension: 2
Measurement dimension: 1
Discrete time: True
Generating synthetic data...
Generated 50 timesteps of observations
Setting up Koopman Kalman Filter...
Number of kernel features: 20
Prior initial state mean: [0.9 0.4]
Applying Koopman Kalman Filter...
✓ Filter completed successfully!
Solution properties:
State dimension: 2
Feature dimension: 20
Estimation errors:
Mean absolute error: 0.146182
Max absolute error: 0.252747
Generating plots...
/home/docs/checkouts/readthedocs.org/user_builds/kkf/checkouts/latest/examples/01_basic_linear_system.py:170: UserWarning: Tight layout not applied. The bottom and top margins cannot be made large enough to accommodate all Axes decorations.
plt.tight_layout()
Figure saved as 'kkf_basic_example.png'
======================================================================
Example completed successfully!
======================================================================
import numpy as np
import matplotlib.pyplot as plt
from scipy import stats
from sklearn.gaussian_process.kernels import RBF
from kkf import DynamicalSystem, KoopmanOperator, apply_koopman_kalman_filter
def main():
"""Run basic KKF example."""
print("=" * 70)
print("KKF Basic Example: Simple Linear System")
print("=" * 70)
# System parameters
nx, ny = 2, 1 # State dimension: 2, Measurement dimension: 1
dt = 0.1
# Define linear system dynamics: x[k+1] = A @ x[k]
A = np.array([[0.9, 0.05], [0.0, 0.95]])
def f(x):
"""State transition function."""
return A @ x
def g(x):
"""Measurement function (observe first state)."""
return np.array([x[0]])
# Define noise distributions
X_dist = stats.multivariate_normal(mean=np.zeros(nx), cov=np.eye(nx))
dyn_noise_dist = stats.multivariate_normal(
mean=np.zeros(nx), cov=1e-3 * np.eye(nx)
)
obs_noise_dist = stats.multivariate_normal(mean=np.zeros(ny), cov=1e-2 * np.eye(ny))
# Create dynamical system
system = DynamicalSystem(
nx=nx,
ny=ny,
f=f,
g=g,
dist_X=X_dist,
dist_dyn=dyn_noise_dist,
dist_obs=obs_noise_dist,
discrete_time=True,
)
print(f"\nSystem created:")
print(f" State dimension: {system.nx}")
print(f" Measurement dimension: {system.ny}")
print(f" Discrete time: {system.discrete_time}")
# Generate synthetic measurement data
print(f"\nGenerating synthetic data...")
n_timesteps = 50
x_true = np.zeros((n_timesteps, nx))
y_meas = np.zeros((n_timesteps, ny))
# Initial state
x_true[0] = np.array([1.0, 0.5])
y_meas[0] = g(x_true[0]) + obs_noise_dist.rvs()
for t in range(1, n_timesteps):
x_true[t] = f(x_true[t - 1]) + dyn_noise_dist.rvs()
y_meas[t] = g(x_true[t]) + obs_noise_dist.rvs()
print(f" Generated {n_timesteps} timesteps of observations")
# Setup Koopman operator
print(f"\nSetting up Koopman Kalman Filter...")
n_features = 20
kernel = RBF(length_scale=1.0)
koopman_op = KoopmanOperator(kernel, system)
# Define prior for initial state
x0_prior = np.array([0.9, 0.4])
initial_prior = stats.multivariate_normal(
mean=x0_prior, cov=0.1 * np.eye(nx)
)
print(f" Number of kernel features: {n_features}")
print(f" Prior initial state mean: {x0_prior}")
# Apply Koopman Kalman Filter
print(f"\nApplying Koopman Kalman Filter...")
solution = apply_koopman_kalman_filter(
koopman_operator=koopman_op,
observations=y_meas,
initial_distribution=initial_prior,
n_features=n_features,
optimize=False,
noise_samples=50,
)
print(f"✓ Filter completed successfully!")
print(f"\nSolution properties:")
print(f" State dimension: {solution.get_state_dimension()}")
print(f" Feature dimension: {solution.get_feature_dimension()}")
# Compute errors
state_error = np.linalg.norm(solution.x_plus - x_true, axis=1)
mean_error = np.mean(state_error)
max_error = np.max(state_error)
print(f"\nEstimation errors:")
print(f" Mean absolute error: {mean_error:.6f}")
print(f" Max absolute error: {max_error:.6f}")
# Visualization
print(f"\nGenerating plots...")
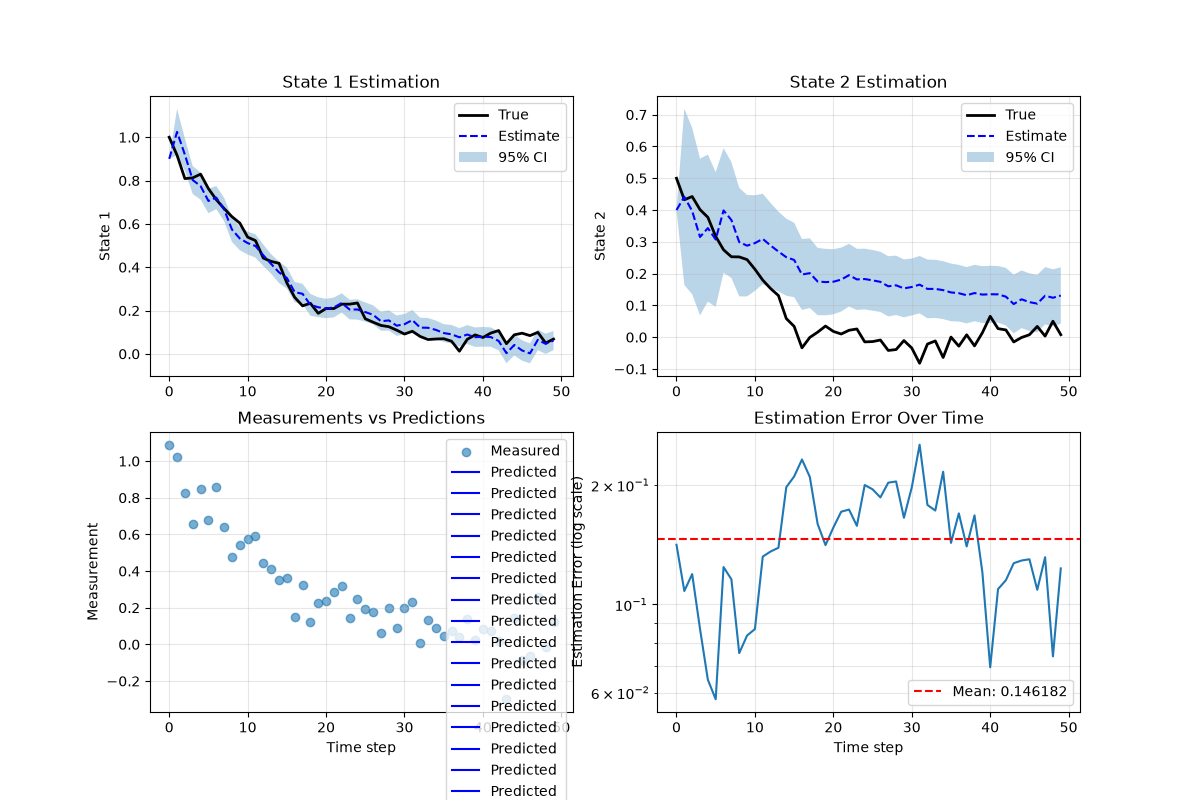
fig, axes = plt.subplots(2, 2, figsize=(12, 8))
# Plot 1: State estimates vs true state
axes[0, 0].plot(x_true[:, 0], "k-", label="True", linewidth=2)
axes[0, 0].plot(solution.x_plus[:, 0], "b--", label="Estimate", linewidth=1.5)
axes[0, 0].fill_between(
np.arange(n_timesteps),
solution.x_plus[:, 0] - np.sqrt(np.diagonal(solution.Px_plus, axis1=1, axis2=2))[:, 0],
solution.x_plus[:, 0] + np.sqrt(np.diagonal(solution.Px_plus, axis1=1, axis2=2))[:, 0],
alpha=0.3,
label="95% CI"
)
axes[0, 0].set_ylabel("State 1")
axes[0, 0].legend()
axes[0, 0].grid(True, alpha=0.3)
axes[0, 0].set_title("State 1 Estimation")
# Plot 2: Second state
axes[0, 1].plot(x_true[:, 1], "k-", label="True", linewidth=2)
axes[0, 1].plot(solution.x_plus[:, 1], "b--", label="Estimate", linewidth=1.5)
axes[0, 1].fill_between(
np.arange(n_timesteps),
solution.x_plus[:, 1] - np.sqrt(np.diagonal(solution.Px_plus, axis1=1, axis2=2))[:, 1],
solution.x_plus[:, 1] + np.sqrt(np.diagonal(solution.Px_plus, axis1=1, axis2=2))[:, 1],
alpha=0.3,
label="95% CI"
)
axes[0, 1].set_ylabel("State 2")
axes[0, 1].legend()
axes[0, 1].grid(True, alpha=0.3)
axes[0, 1].set_title("State 2 Estimation")
# Plot 3: Measurements
axes[1, 0].scatter(np.arange(n_timesteps), y_meas[:, 0], alpha=0.6, label="Measured")
axes[1, 0].plot(g(solution.x_plus.T), "b-", label="Predicted", linewidth=1.5)
axes[1, 0].set_xlabel("Time step")
axes[1, 0].set_ylabel("Measurement")
axes[1, 0].legend()
axes[1, 0].grid(True, alpha=0.3)
axes[1, 0].set_title("Measurements vs Predictions")
# Plot 4: Estimation error
axes[1, 1].semilogy(state_error)
axes[1, 1].axhline(y=mean_error, color="r", linestyle="--", label=f"Mean: {mean_error:.6f}")
axes[1, 1].set_xlabel("Time step")
axes[1, 1].set_ylabel("Estimation Error (log scale)")
axes[1, 1].legend()
axes[1, 1].grid(True, alpha=0.3, which="both")
axes[1, 1].set_title("Estimation Error Over Time")
plt.tight_layout()
plt.savefig("kkf_basic_example.png", dpi=100, bbox_inches="tight")
print(" Figure saved as 'kkf_basic_example.png'")
plt.show()
print("\n" + "=" * 70)
print("Example completed successfully!")
print("=" * 70)
if __name__ == "__main__":
main()
Total running time of the script: (0 minutes 1.396 seconds)