Note
Go to the end to download the full example code.
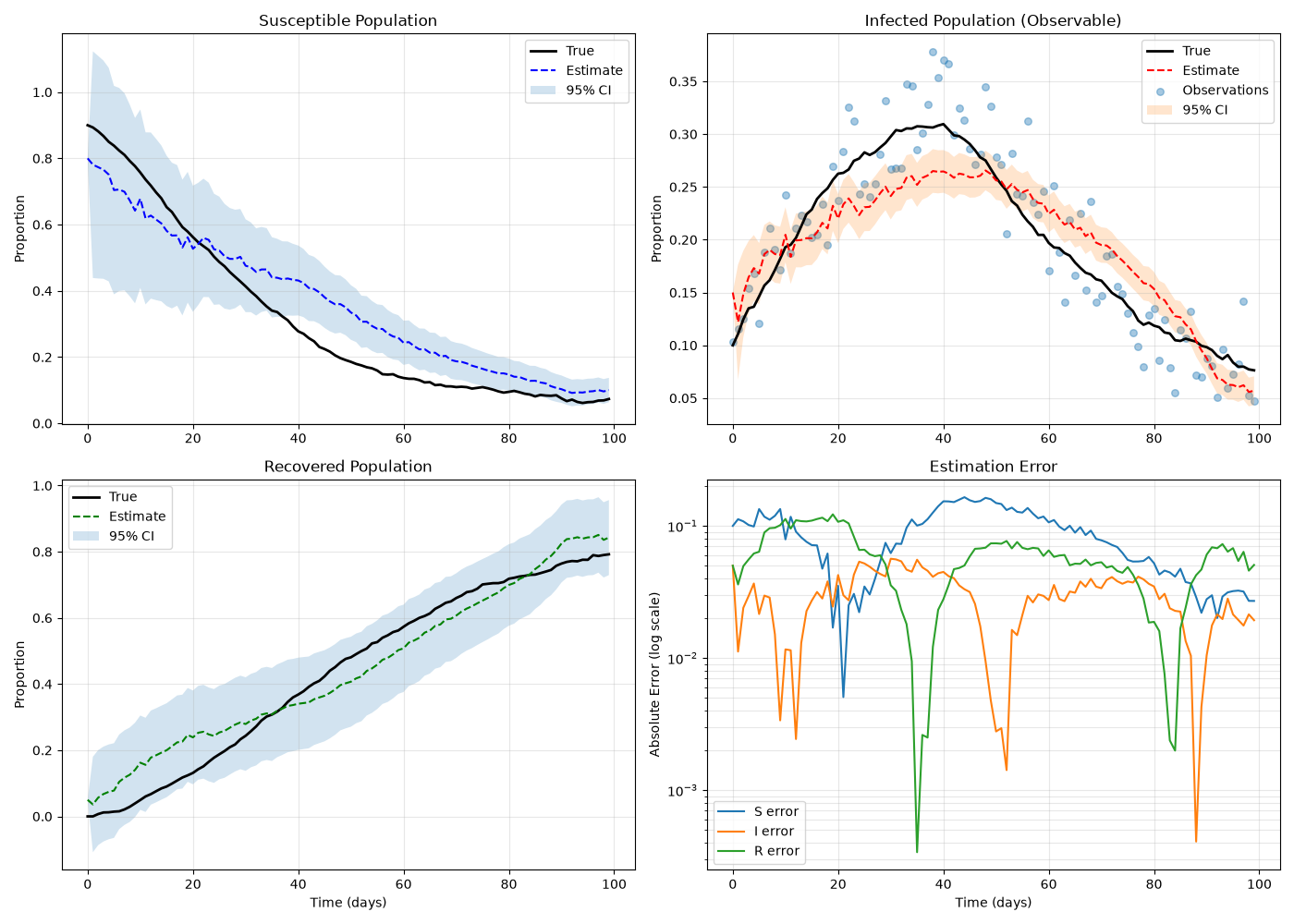
SIR Epidemic Model#
This example demonstrates using KKF to estimate states in a Susceptible-Infected-Recovered (SIR) epidemiological model.
======================================================================
KKF Example: SIR Epidemiological Model
======================================================================
SIR Model Properties:
Transmission rate (β): 0.12
Recovery rate (γ): 0.04
State dimension: 3 (S, I, R)
Observable: Infected population
Generating synthetic epidemic data...
Generated 100 timesteps
Peak infected: 0.3095
Setting up Koopman Kalman Filter...
Kernel: Matérn with length scale ~ 0.2714
Number of features: 50
Prior initial state: [0.8 0.15 0.05]
Applying Koopman Kalman Filter...
✓ Filter completed!
State Estimation Results:
Initial S estimate: 0.8000 (true: 0.9000)
Initial I estimate: 0.1500 (true: 0.1000)
Initial R estimate: 0.0500 (true: 0.0000)
Generating plots...
Figure saved as 'kkf_sir_example.png'
======================================================================
Example completed successfully!
======================================================================
import numpy as np
import matplotlib.pyplot as plt
from scipy import stats
from sklearn.gaussian_process.kernels import Matern
from kkf import DynamicalSystem, KoopmanOperator, apply_koopman_kalman_filter
def main():
"""Run SIR model KKF example."""
print("=" * 70)
print("KKF Example: SIR Epidemiological Model")
print("=" * 70)
# System parameters
beta, gamma = 0.12, 0.04 # Transmission and recovery rates
def f(x):
"""SIR dynamics."""
return x + np.array([
-beta * x[0] * x[1],
beta * x[0] * x[1] - gamma * x[1],
gamma * x[1]
])
def g(x):
"""Observe infected population."""
return np.array([x[1]])
# System dimensions
nx, ny = 3, 1
n_features = 50
# Noise distributions
X_dist = stats.dirichlet(alpha=np.ones(nx))
dyn_dist = stats.multivariate_normal(mean=np.zeros(nx), cov=1e-5 * np.eye(3))
obs_dist = stats.multivariate_normal(mean=np.zeros(ny), cov=1e-3 * np.eye(1))
# Create system
system = DynamicalSystem(
nx=nx,
ny=ny,
f=f,
g=g,
dist_X=X_dist,
dist_dyn=dyn_dist,
dist_obs=obs_dist,
discrete_time=True,
)
print(f"\nSIR Model Properties:")
print(f" Transmission rate (β): {beta}")
print(f" Recovery rate (γ): {gamma}")
print(f" State dimension: {nx} (S, I, R)")
print(f" Observable: Infected population")
# Generate synthetic data
print(f"\nGenerating synthetic epidemic data...")
n_timesteps = 100
x_true = np.zeros((n_timesteps, nx))
y_meas = np.zeros((n_timesteps, ny))
# Initial condition: mostly susceptible, few infected
x_true[0] = np.array([0.9, 0.1, 0.0])
y_meas[0] = g(x_true[0]) + obs_dist.rvs()
for t in range(1, n_timesteps):
x_true[t] = f(x_true[t - 1]) + dyn_dist.rvs()
# Ensure state remain in valid range [0, 1]
x_true[t] = np.clip(x_true[t], 0, 1)
y_meas[t] = g(x_true[t]) + obs_dist.rvs()
print(f" Generated {n_timesteps} timesteps")
print(f" Peak infected: {np.max(x_true[:, 1]):.4f}")
# Setup Koopman operator
print(f"\nSetting up Koopman Kalman Filter...")
kernel = Matern(length_scale=n_features ** (-1 / nx), nu=0.5)
koop = KoopmanOperator(kernel, system)
# Prior distribution
x0_prior = np.array([0.8, 0.15, 0.05])
dist_prior = stats.multivariate_normal(mean=x0_prior, cov=0.1 * np.eye(3))
print(f" Kernel: Matérn with length scale ~ {kernel.length_scale:.4f}")
print(f" Number of features: {n_features}")
print(f" Prior initial state: {x0_prior}")
# Apply filter
print(f"\nApplying Koopman Kalman Filter...")
solution = apply_koopman_kalman_filter(
koopman_operator=koop,
observations=y_meas,
initial_distribution=dist_prior,
n_features=n_features,
optimize=False,
noise_samples=100,
)
print(f"✓ Filter completed!")
# Analysis
print(f"\nState Estimation Results:")
print(f" Initial S estimate: {solution.x_plus[0, 0]:.4f} (true: {x_true[0, 0]:.4f})")
print(f" Initial I estimate: {solution.x_plus[0, 1]:.4f} (true: {x_true[0, 1]:.4f})")
print(f" Initial R estimate: {solution.x_plus[0, 2]:.4f} (true: {x_true[0, 2]:.4f})")
# Visualization
print(f"\nGenerating plots...")
fig, axes = plt.subplots(2, 2, figsize=(14, 10))
# Plot 1: Susceptible population
time = np.arange(n_timesteps)
axes[0, 0].plot(time, x_true[:, 0], "k-", label="True", linewidth=2)
axes[0, 0].plot(time, solution.x_plus[:, 0], "b--", label="Estimate", linewidth=1.5)
axes[0, 0].fill_between(
time,
solution.x_plus[:, 0] - 1.96 * np.sqrt(np.diagonal(solution.Px_plus, axis1=1, axis2=2))[:, 0],
solution.x_plus[:, 0] + 1.96 * np.sqrt(np.diagonal(solution.Px_plus, axis1=1, axis2=2))[:, 0],
alpha=0.2,
label="95% CI"
)
axes[0, 0].set_ylabel("Proportion")
axes[0, 0].set_title("Susceptible Population")
axes[0, 0].legend()
axes[0, 0].grid(True, alpha=0.3)
# Plot 2: Infected population
axes[0, 1].plot(time, x_true[:, 1], "k-", label="True", linewidth=2)
axes[0, 1].plot(time, solution.x_plus[:, 1], "r--", label="Estimate", linewidth=1.5)
axes[0, 1].scatter(time, y_meas[:, 0], alpha=0.4, s=30, label="Observations")
axes[0, 1].fill_between(
time,
solution.x_plus[:, 1] - 1.96 * np.sqrt(np.diagonal(solution.Px_plus, axis1=1, axis2=2))[:, 1],
solution.x_plus[:, 1] + 1.96 * np.sqrt(np.diagonal(solution.Px_plus, axis1=1, axis2=2))[:, 1],
alpha=0.2,
label="95% CI"
)
axes[0, 1].set_ylabel("Proportion")
axes[0, 1].set_title("Infected Population (Observable)")
axes[0, 1].legend()
axes[0, 1].grid(True, alpha=0.3)
# Plot 3: Recovered population
axes[1, 0].plot(time, x_true[:, 2], "k-", label="True", linewidth=2)
axes[1, 0].plot(time, solution.x_plus[:, 2], "g--", label="Estimate", linewidth=1.5)
axes[1, 0].fill_between(
time,
solution.x_plus[:, 2] - 1.96 * np.sqrt(np.diagonal(solution.Px_plus, axis1=1, axis2=2))[:, 2],
solution.x_plus[:, 2] + 1.96 * np.sqrt(np.diagonal(solution.Px_plus, axis1=1, axis2=2))[:, 2],
alpha=0.2,
label="95% CI"
)
axes[1, 0].set_ylabel("Proportion")
axes[1, 0].set_xlabel("Time (days)")
axes[1, 0].set_title("Recovered Population")
axes[1, 0].legend()
axes[1, 0].grid(True, alpha=0.3)
# Plot 4: Phase portrait and error
error_s = np.abs(solution.x_plus[:, 0] - x_true[:, 0])
error_i = np.abs(solution.x_plus[:, 1] - x_true[:, 1])
error_r = np.abs(solution.x_plus[:, 2] - x_true[:, 2])
axes[1, 1].semilogy(time, error_s, label="S error", linewidth=1.5)
axes[1, 1].semilogy(time, error_i, label="I error", linewidth=1.5)
axes[1, 1].semilogy(time, error_r, label="R error", linewidth=1.5)
axes[1, 1].set_xlabel("Time (days)")
axes[1, 1].set_ylabel("Absolute Error (log scale)")
axes[1, 1].set_title("Estimation Error")
axes[1, 1].legend()
axes[1, 1].grid(True, alpha=0.3, which="both")
plt.tight_layout()
plt.savefig("kkf_sir_example.png", dpi=100, bbox_inches="tight")
print(" Figure saved as 'kkf_sir_example.png'")
plt.show()
print("\n" + "=" * 70)
print("Example completed successfully!")
print("=" * 70)
if __name__ == "__main__":
main()
Total running time of the script: (0 minutes 0.975 seconds)